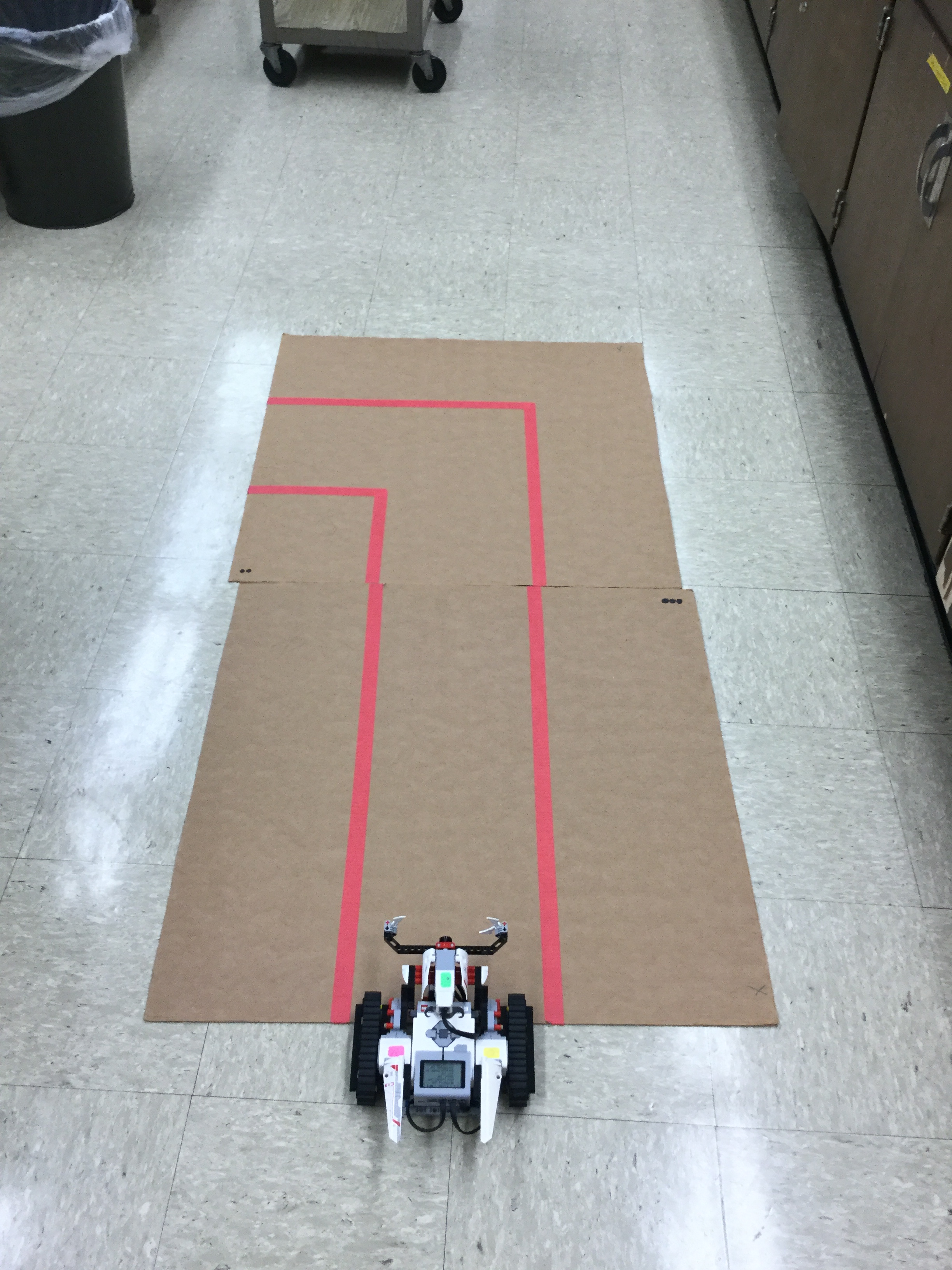
In this challenge, you will have 2 rounds during the challenge. One being autonomous which you will program your robot to move around the playing field to collect a ball and put it into a goal. The second round is tele-op. In tele-op you will be using a remote control to manually control your robot to collect particles.
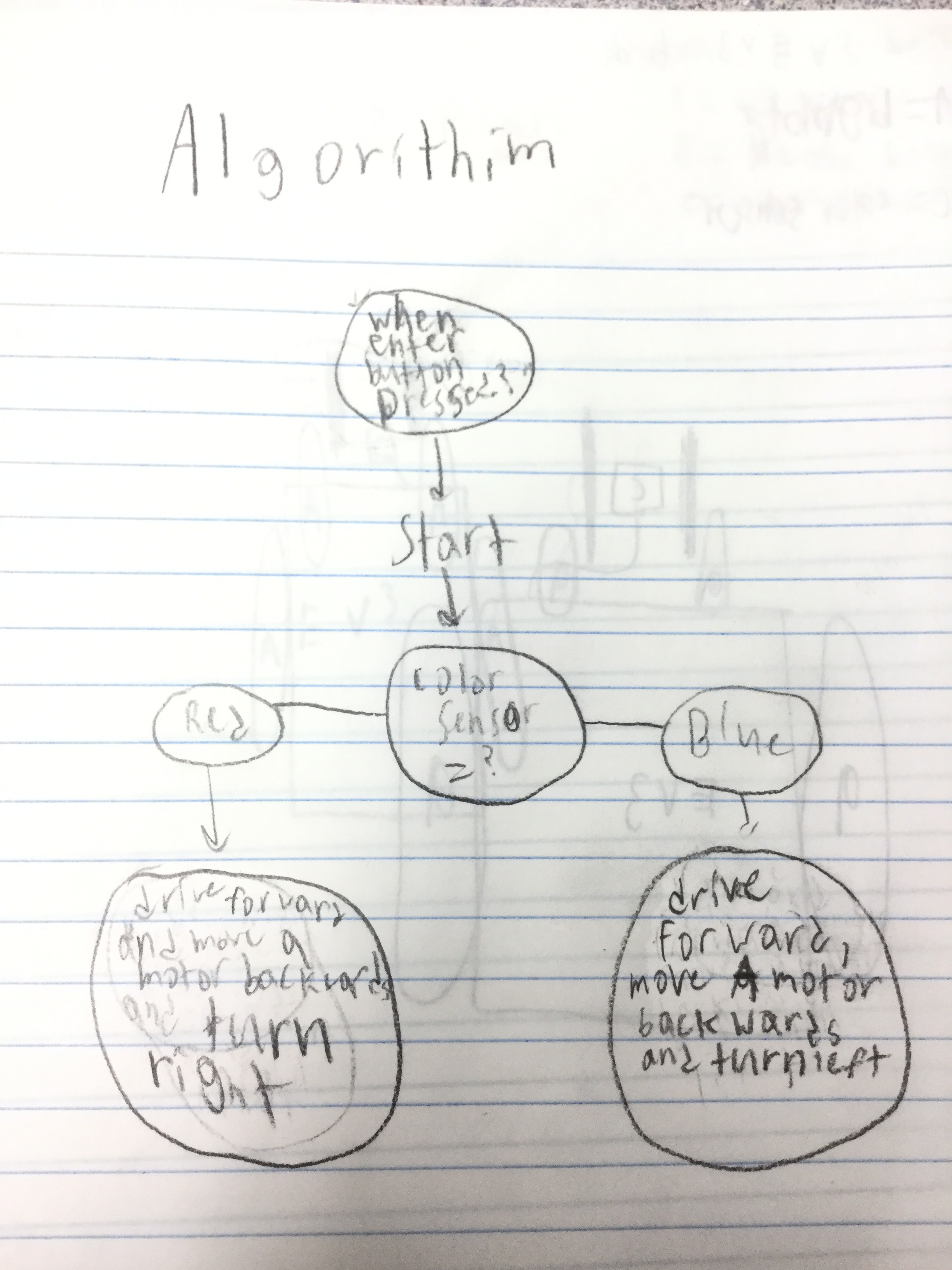
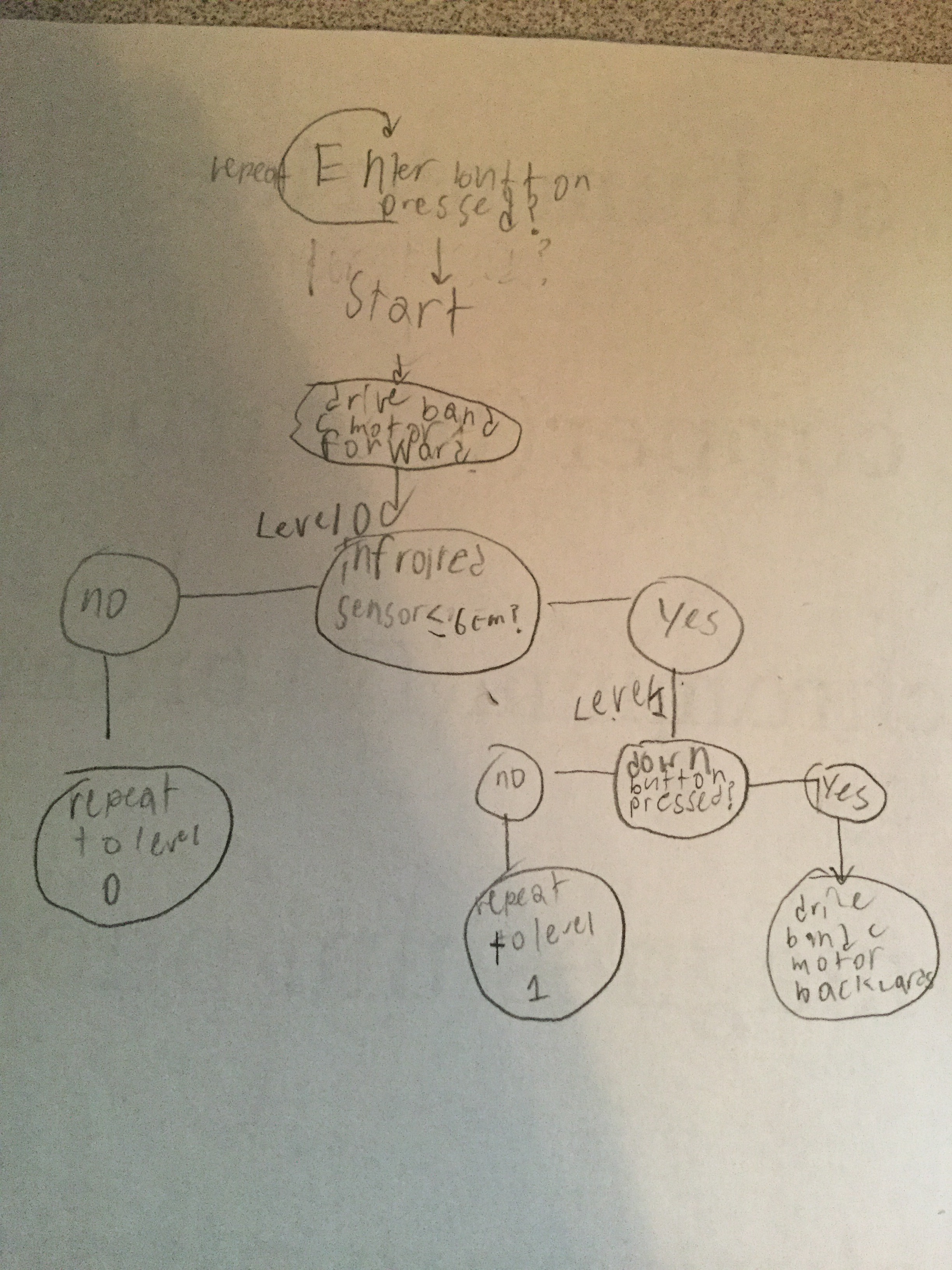
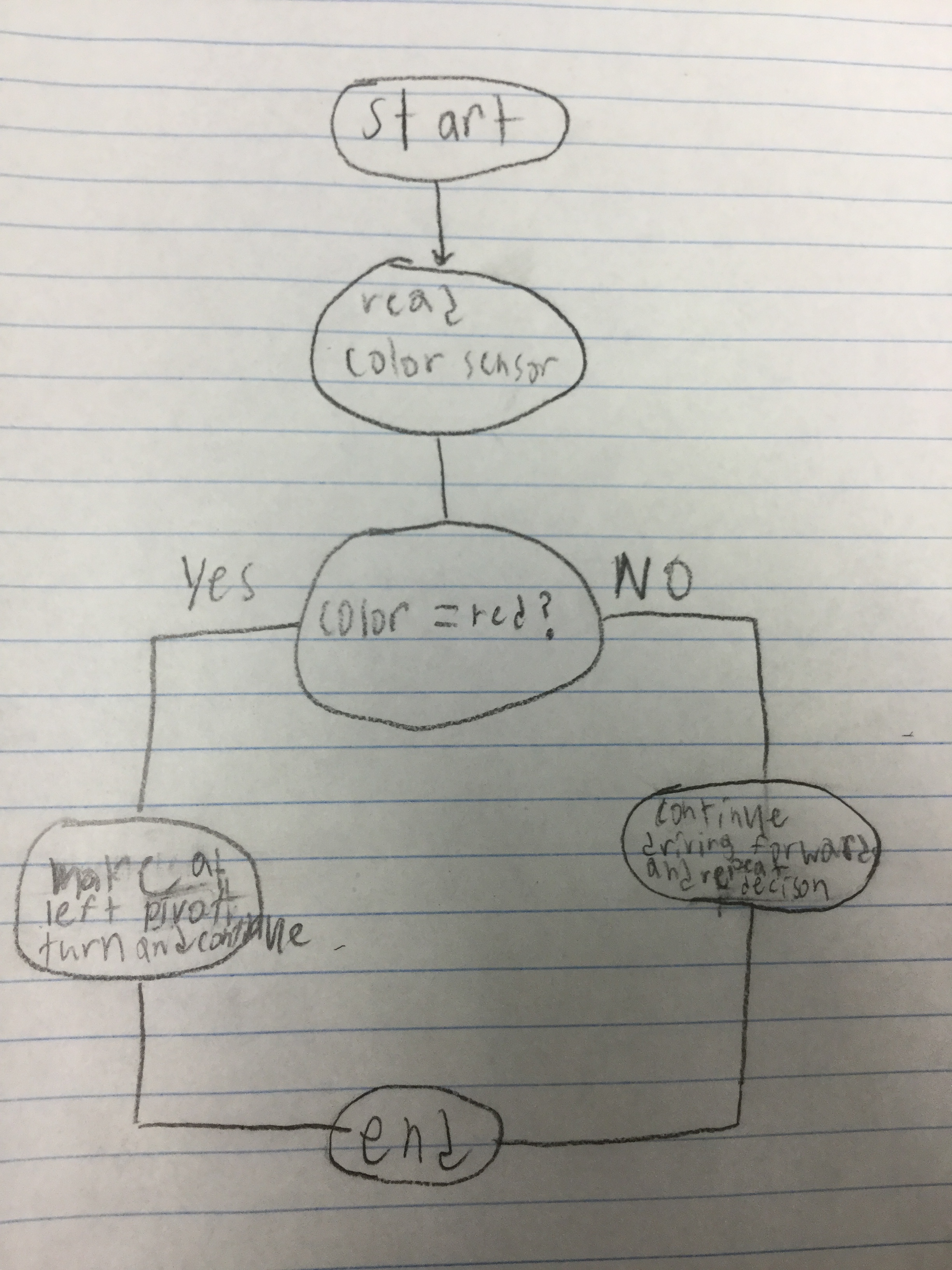
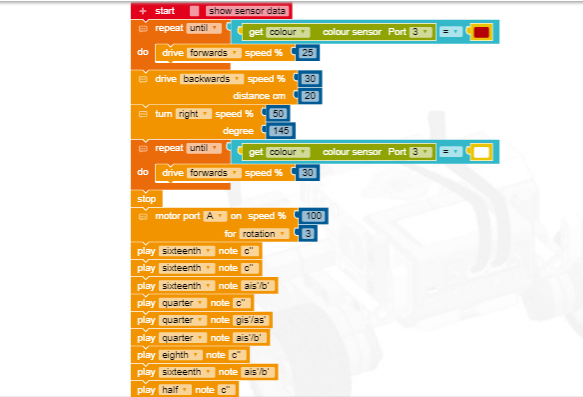
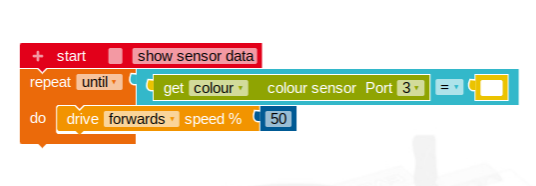
Algorithm
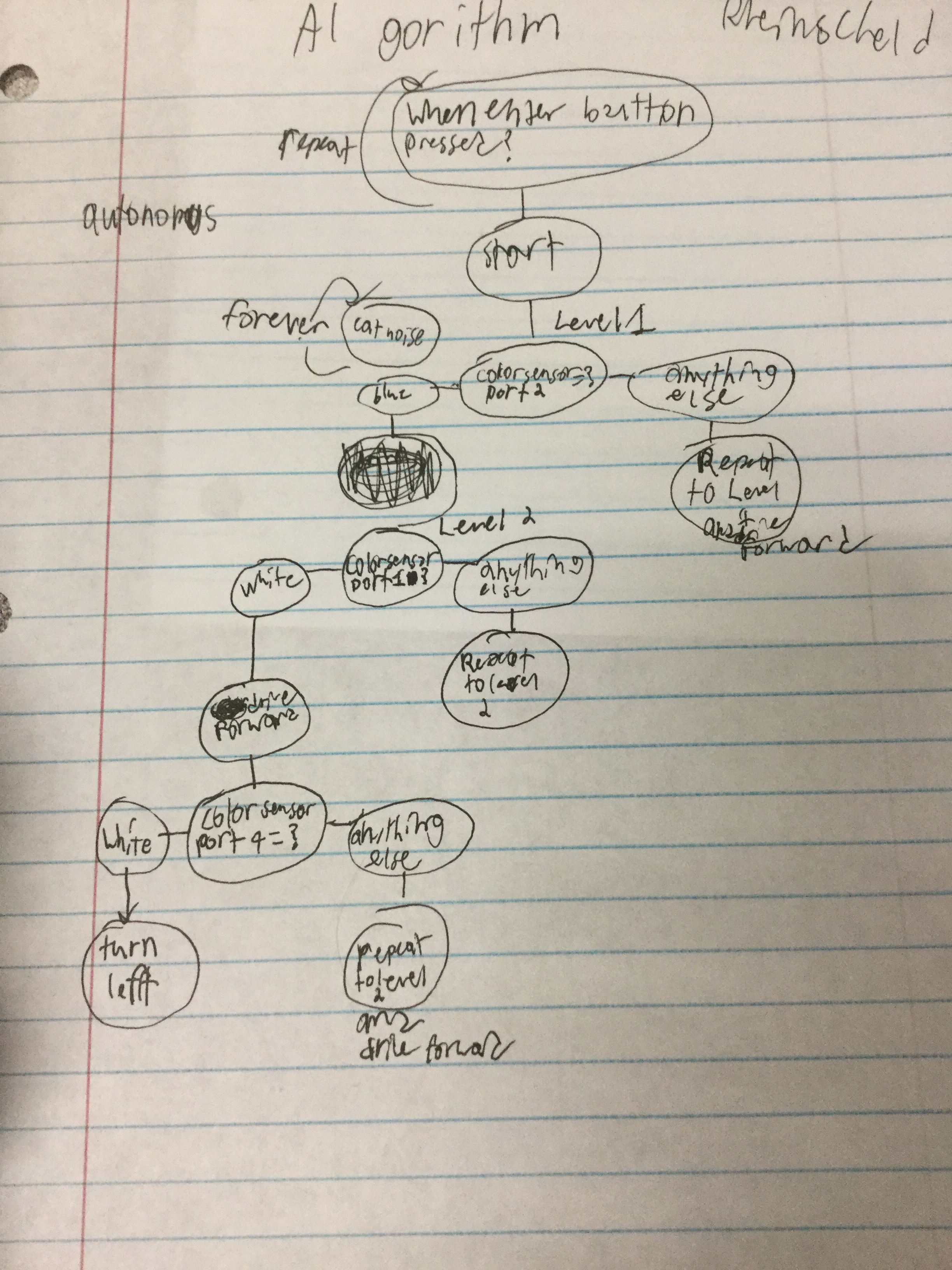
I didn’t spend enough time on the coding as I needed to, I spent too much time modifying my robot physically and not enough time spent towards trial and error with the coding part of the challenge. The main code that got me 5 points every round was coding in a taunt, it was worth 5 points which still helped my teammate and I get in the lead.
Build Plan

My build plan was based off the idea of how a forklift works. The main mechanism was used for lifting the particles and moving them where they needed to be. This helped out in the end by lifting the particles so the other team couldn’t knock the particle out of the reach of my robot. In the end the mechanism did have a few failures, mainly the arm collapsing while trying to pick up a particle, but most of the time it did properly work during the challenge.
Building Progress Reflection

With this being my first prototype, I was very excited for it to work. The main problem with the mechanism was the string kept slipping.

After changing the strings for rubber bands, I thought this would work, then the rubber bands kept breaking on me. The rubber bands were old and would eventually break once in use.

A classmate brought in an extra add-on kit for the EV3. She let me use the tank treads the ultimately fixed my problem with the tread not working.

This code wasn’t fully created, which in the end the robot didn’t collect any particles. Although I did code it to try and find a yellow ball on the field, but I didn’t have enough time to tell it what to do once it was found. What mainly got me points during the 1st round was taunting. It was 5 points, but it was better than no points at all. A link to my code would be found here.
The easy part about this challenge was the tele-op round. I could control the robot where I wanted it to go and collect particles. The hard part of this challenge is either coding the robot or fixing my lifting mechanism.