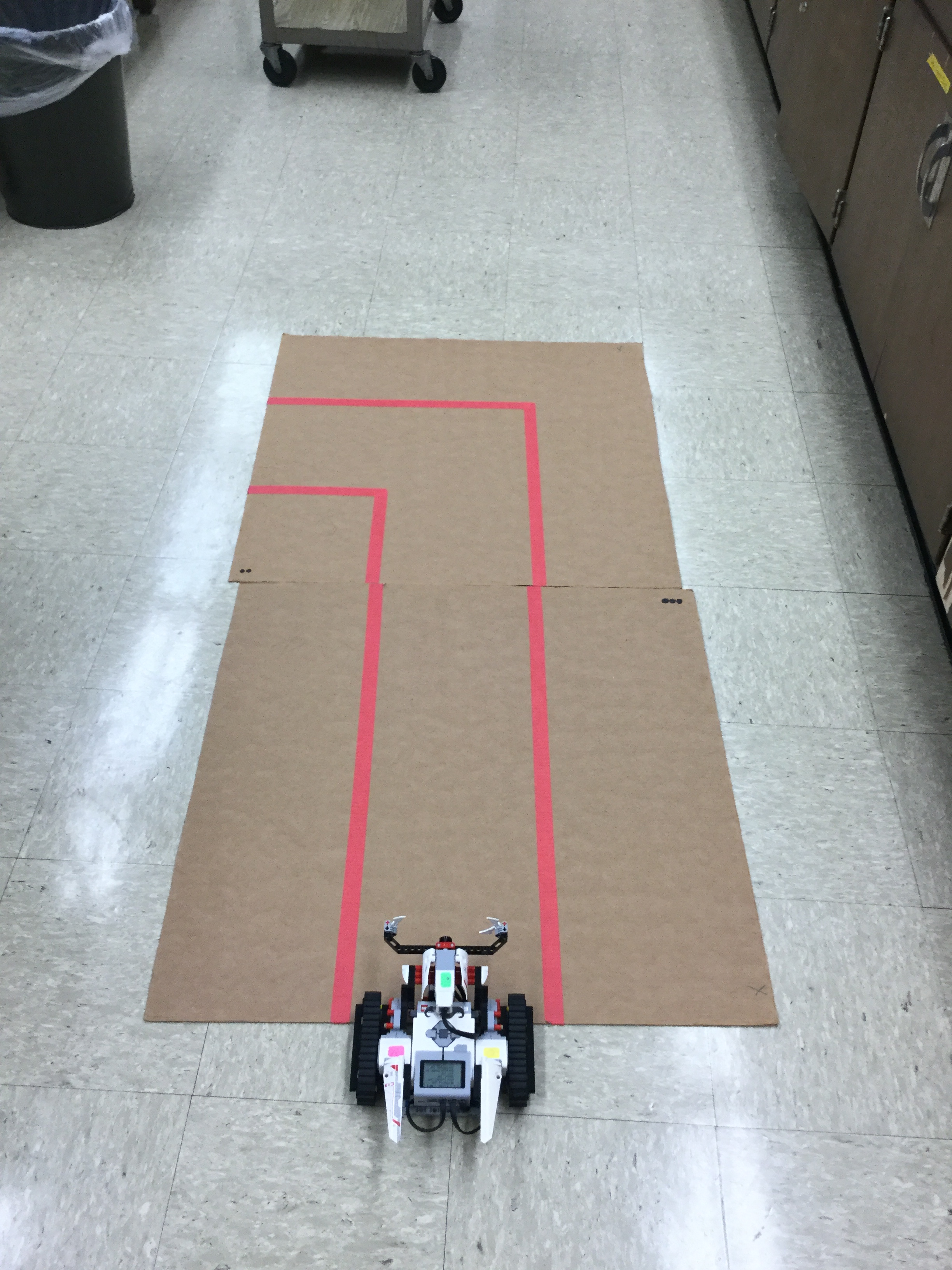
In the second challenge, you will have to direct your robot to make a left turn while staying in the lines, as pictured below.
Algorithm
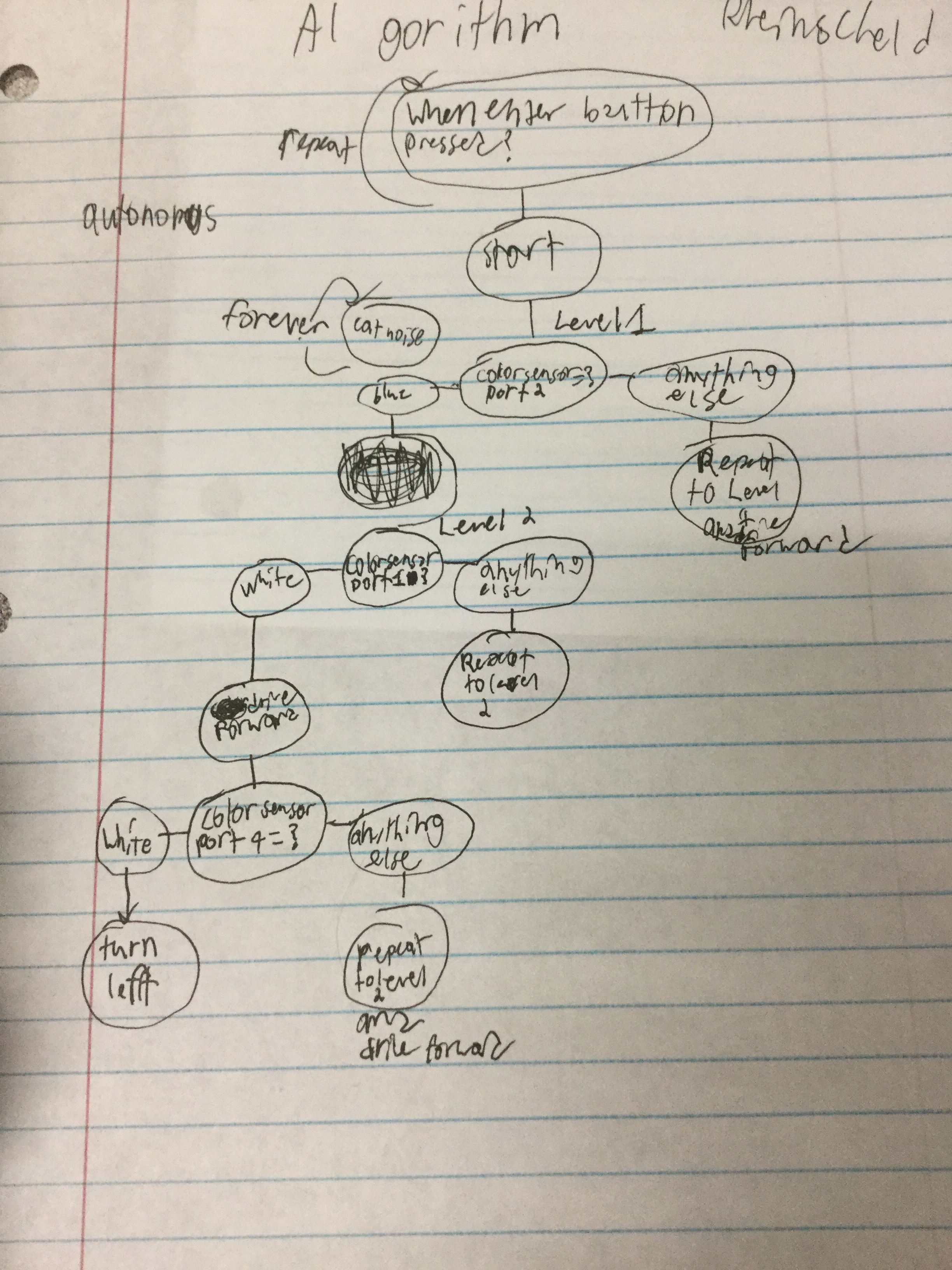
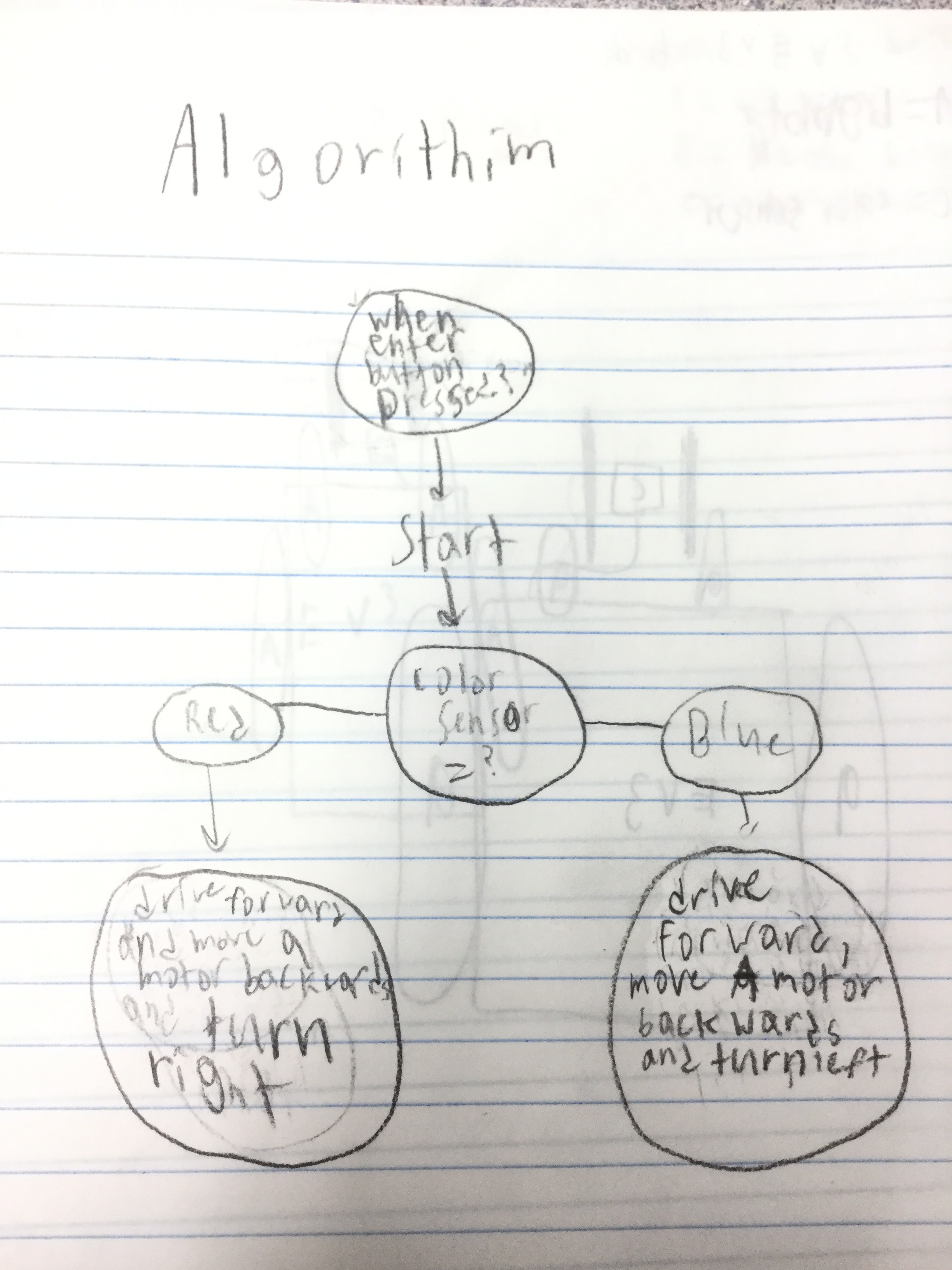
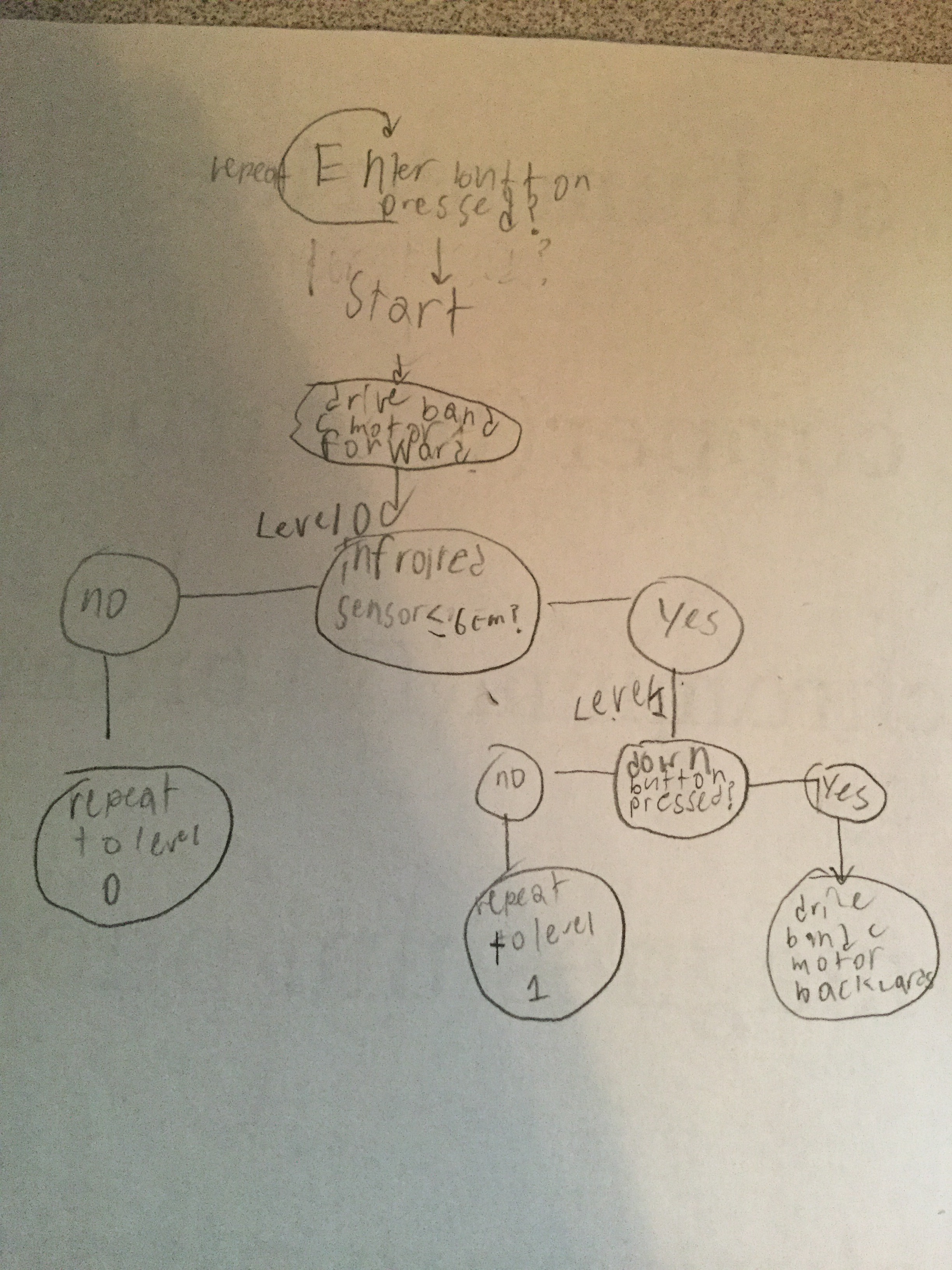
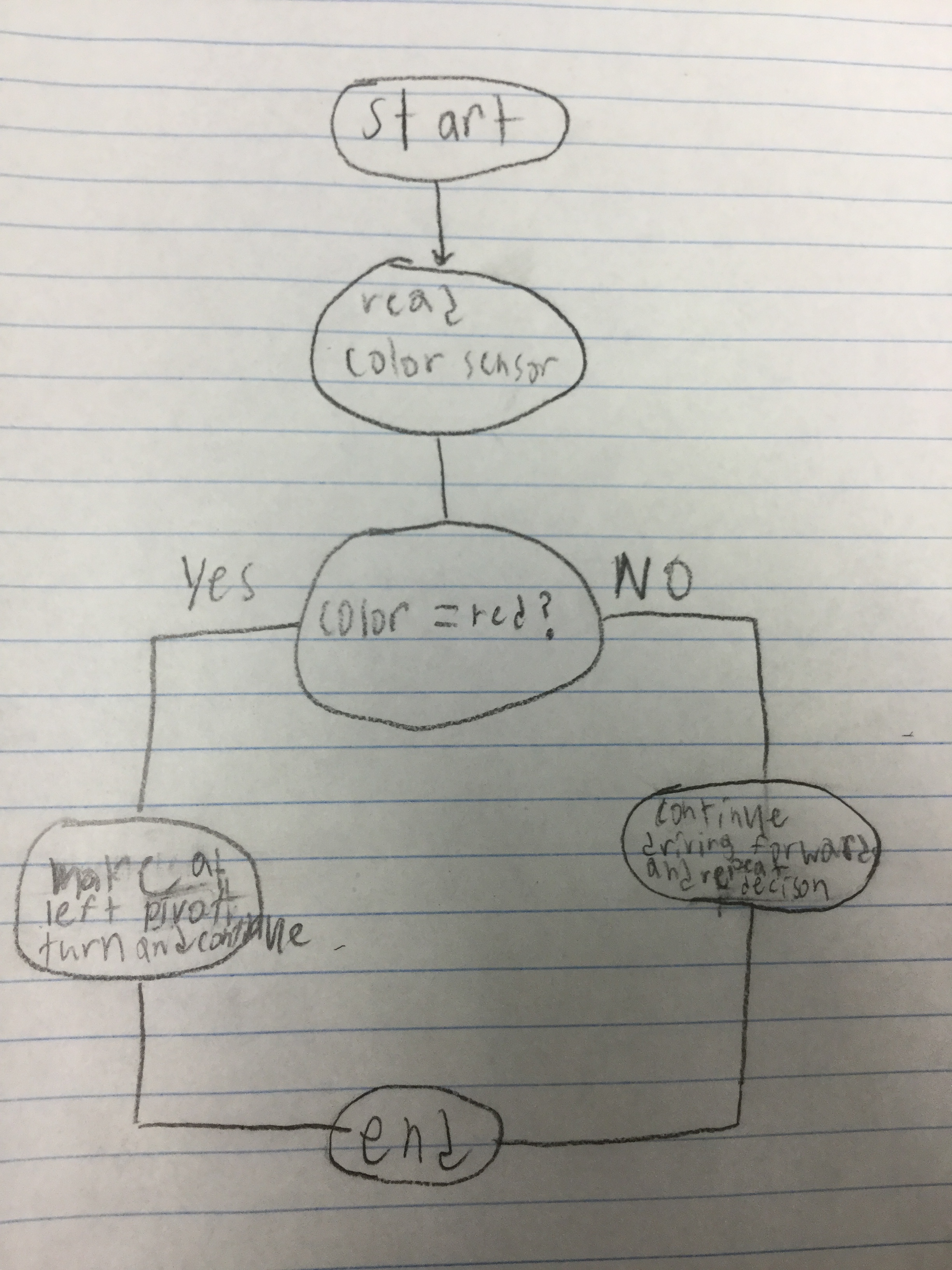
I also made an algorithm before coding. We can change it once we started coding. Below I have my algorithm I started off with.
Building Plan
In this challenge, I used the Lego EV3 TRACK3R robot by Lego Mindstorms. You can find information about it here. I also added the color sensor which will be in the back of the instruction manual for the robot.
Building Progress Reflection

To fix this, I changed the direction of which the robot would turn when the red line was detected.

To solve this, I experimented with different degree turns, until it successfully turned enough, which was a 145-degree turn. Once the robot was able to complete the challenge, I decided to add the Victory Fanfare from Final Fantasy once it completed the challenge. The notes weren’t playing the keys that I programmed them to, so I moved all the notes up an octave, which solved the problem. The cause of the problem was of the small speaker in the EV3 robot speaker wasn’t large enough to play the lower notes.
Program
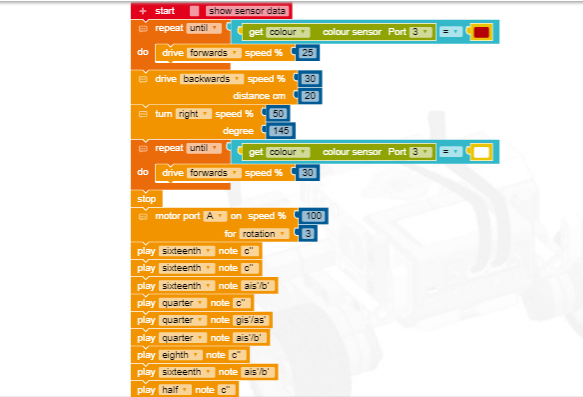
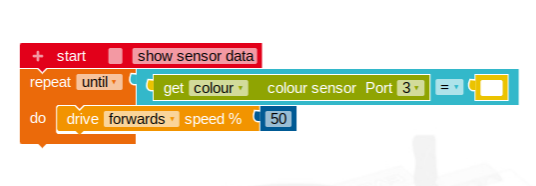
The coding of this challenge was similar to the Make it Move Challenge, in the sense of having the robot move forward until the color sensor senses a color. After that, all I needed to do was add a turn, and have the robot drive forward until it reached the end of the board.
The easiest part of having the robot completing the challenge was the parts of the code that I have used in the previous challenge since I have already used, therefore making it easier to program. The hardest part of this challenge was troubleshooting the rotation. It was hard because I had to repeatedly keep changing the degree value until the robot turned enough to complete the challenge.