

In this challenge, you will change the design of your robot in order to lift a jug full of water tied onto the robot with a string so that you can pull 4 joules worth of work. The use of gears will help get more power out of your little motors by using what’s called a gear ratio. Using gears will help take stress off the motors and get more power out of the motors then what you would usually.
Algorithm
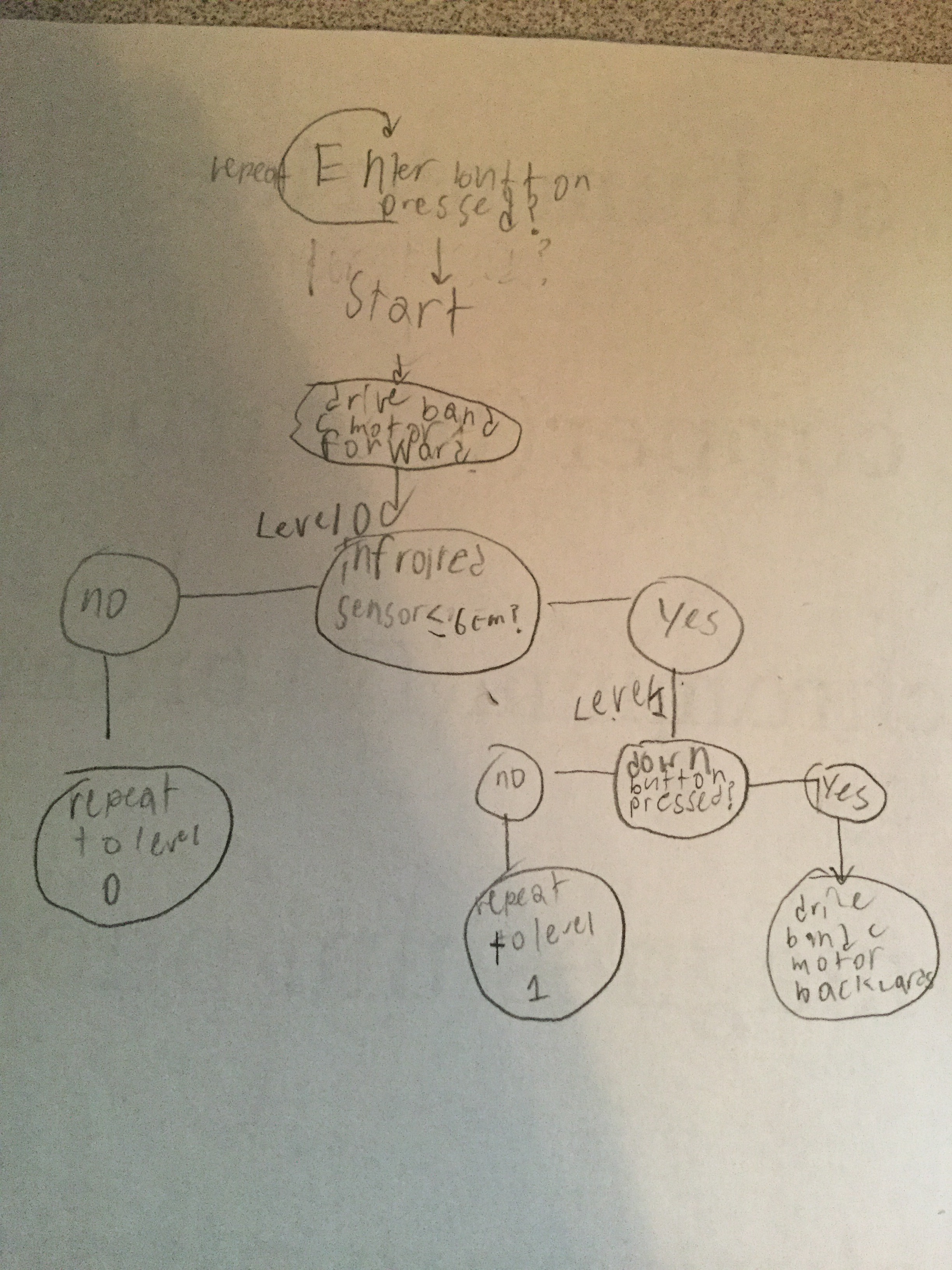
Building Plan



As I was going through the process of testing the robot, I was mostly adding more support and making the robot lift more efficiently. At the start of the challenge, I didn’t realize how much I needed to change the design of the robot until I realized that it had to do a different task and the robot won’t be efficient enough until I build a new design of the robot that will lift the jug efficiently.
Building Progress Reflection
Programming the robot was a little challenging because of what I wanted the robot to do after lifting the jug. After it lifting the jug, I wanted the b and c motors to move backwards when i pressed the down button on the robot, but i couldn’t get the program to move on after the distance sensor was less than or equal to 6 centimeters. I fixed this by using the “repeat until” instead of the “if, do” block.


When the robot lifted the jug, it used about 4.28 J to lift the jug. The robot also use about 21 mW of power to lift the jug with the two motors. The robot ended up having a 26:20 gear ratio in the gear boz so that it’ll lift the jug with less power.
There was no really easy part this challenge, the hardest part was building the robot so it’ll complete the challenge in an orderly fashion. The programming aspect was hard as well because of the decisions the robot had to make based on its outer surroundings.
